Изучение электрического двигателя постоянного тока лабораторная. Разбираемся в принципах работы электродвигателей: преимущества и недостатки разных видов
Условие задачи: Лабораторная работа № 10. Изучение электрического двигателя постоянного тока (на модели).
Задача из
решебника по Физике, 8 класс, А.В.Перышкин, Н.А.Родина
за 1998 год
Онлайн решебник по физике
за 8 класс
Лабораторные работы
— номер
10
Изучение электрического двигателя постоянного тока (на модели).
Цель работы: Ознакомиться с основными деталями электрического двигателя постоянного тока на модели этого двигателя.
Это, пожалуй, самая несложная работа за курс 8 класса. Нужно только подключить модель двигателя к источнику тока, посмотреть, как она работает, и запомнить названия основных частей электродвигателя (якорь, индуктор, щетки, полукольца, обмотка, вал).
Предложенный вам учителем электродвигатель может быть похож на изображенный на рисунке, а может иметь другой вид, поскольку вариантов школьных электрических двигателей существует много. Принципиального значения это не имеет, так как учитель наверняка подробно расскажет и покажет, как обращаться с моделью.
Перечислим основные причины того, что правильно подключенный электродвигатель не работает. Обрыв цепи, отсутствие контакта щеток с полукольцами, повреждение обмотки якоря. Если в первых двух случаях вы вполне способны справится самостоятельно, в случае обрыва обмотки нужно обратиться к преподавателю. Перед включением двигателя следует убедиться, что его якорь может свободно вращаться и ему ничего не мешает, иначе при включении электродвигатель будет издавать характерное гудение, но вращаться не будет.
Не знаете как решить? Можете помочь с решением? Заходите и спрашивайте.
←Лабораторная работа № 9. Сборка электромагнита и испытание его действия.Лабораторная работа № 11. Получение изображения при помощи линзы.-
Электродвигатель – это электротехническое устройство для преобразования электрической энергии в механическую. Сегодня повсеместно применяются электромоторы в промышленности для привода различных станков и механизмов. В домашнем хозяйстве они установлены в стиральной машине, холодильнике, соковыжималке, кухонном комбайне, вентиляторах, электробритвах и т. п. Электродвигатели приводят в движение, подключенные к ней устройства и механизмы.
В этой статье Я расскажу о самых распространенных видах и принципах работы электрических двигателей переменного тока, широко используемых в гараже, в домашнем хозяйстве или мастерской.
Как работает электродвигатель
Двигатель работает на основе эффекта , обнаруженного Майклом Фарадеем еще в 1821 году. Он сделал открытие, что при взаимодействии электрического тока в проводнике и магнита может возникнуть непрерывное вращение.
Если в однородном магнитном поле расположить в вертикальном положении рамку и пропустить по ней ток, тогда вокруг проводника возникнет электромагнитное поле, которое будет взаимодействовать с полюсами магнитов. От одного рамка будет отталкиваться, а к другому притягиваться.
В результате рамка повернется в горизонтальное положения, в котором будет нулевым воздействие магнитного поля на проводник. Для того что бы вращение продолжилось необходимо добавить еще одну рамку под углом или изменить направление тока в рамке в подходящий момент.
На рисунке это делается при помощи двух полуколец, к которым примыкают контактные пластины от батарейки. В результате после совершения полуоборота меняется полярность и вращение продолжается.
В современных электродвигателях вместо постоянных магнитов для создания магнитного поля используются катушки индуктивности или электромагниты. Если разобрать любой мотор, то Вы увидите намотанные витки проволоки, покрытой изоляционным лаком. Эти витки и есть электромагнит или как их еще называют обмотка возбуждения.
В быту же постоянные магниты используются в детских игрушках на батарейках.
В других же более мощных двигателях используются только электромагниты или обмотки. Вращающаяся часть с ними называется ротор, а неподвижная- статор.
Виды электродвигателей
Сегодня существуют довольно много электродвигателей разных конструкций и типов. Их можно разделить по типу электропитания :
- Переменного тока , работающие напрямую от электросети.
- Постоянного тока , которые работают от батареек, АКБ, блоков питания или других источников постоянного тока .
По принципу работы:
- Синхронные , в которых есть обмотки на роторе и щеточный механизм для подачи на них электрического тока.
- Асинхронные , самый простой и распространенный вид мотора. В них нет щеток и обмоток на роторе.
Синхронный мотор вращается синхронно с магнитным полем, которое его вращает, а у асинхронного ротор вращается медленнее вращающегося магнитного поля в статоре.
Принцип работы и устройство асинхронного электродвигателя
В корпусе асинхронного двигателя укладываются обмотки статора (для 380 Вольт их будет 3), которые создают вращающееся магнитное поле. Концы их для подключения выводятся на специальную клеммную колодку. Охлаждаются обмотки, благодаря вентилятору, установленному на вале в торце электродвигателя.
Ротор
, являющиеся одним целым с валом, изготавливается из металлических стержней, которые замыкаются между собой с обоих сторон, поэтому он и называется короткозамкнутым.
Благодаря такой конструкции отпадает необходимость в частом периодическом обслуживании и замене токоподающих щеток, многократно увеличивается надежность, долговечность и безотказность.
Как правило, основной причиной поломки асинхронного мотора является износ подшипников, в которых вращается вал.
Принцип работы. Для того что бы работал асинхронный двигатель необходимо, что бы ротор вращался медленнее электромагнитного поля статора, в результате чего наводится ЭДС (возникает электроток) в роторе. Здесь важное условие, если бы ротор вращался с такой же скоростью как и магнитное поле, то в нем по закону электромагнитной индукции не наводилось бы ЭДС и, следовательно не было бы вращения. Но в реальности, из-за трения подшипников или нагрузки на вал, ротор всегда будет вращаться медленнее.
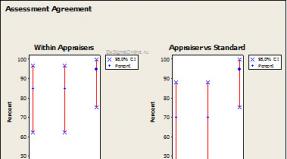
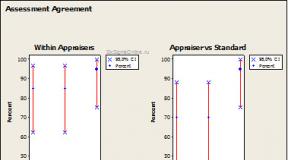
Магнитные полюса постоянно вращаются в обмотках мотора, и постоянно меняется направление тока в роторе. В один момент времени, например направление токов в обмотках статора и ротора изображено схематично в виде крестиков (ток течет от нас) и точек (ток на нас). Вращающееся магнитное поле изображено изображено пунктиром.
Например, как работает циркулярная пила . Наибольшие обороты у нее без нагрузки. Но как только мы начинаем резать доску, скорость вращения уменьшается и одновременно с этим ротор начинает медленнее вращаться относительно электромагнитного поля и в нем по законам электротехники начинает наводится еще большей величины ЭДС. Вырастает потребляемый ток мотором и он начинает работать на полной мощности. Если же нагрузка на вал будет столь велика, что его застопорит, то может возникнуть повреждение короткозамкнутого ротора из-за максимальной величины наводимой в нем ЭДС. Вот почему важно подбирать двигатель, подходящей мощности. Если же взять большей, то неоправданными будут энергозатраты.
Скорость вращения ротора зависит от количества полюсов. При 2 полюсах скорость вращения будет равна скорости вращения магнитного поля, равного максимум 3000 оборотов в секунду при частоте сети 50 Гц. Что бы понизить скорость вдвое, необходимо увеличить количество полюсов в статоре до четырех.
Весомым недостатком асинхронных двигателей является то, что они подаются регулировке скорости вращения вала только при помощи изменения частоты электрического тока. А так не возможно добиться постоянной частоты вращения вала.
Принцип работы и устройство синхронного электродвигателя переменного тока

Данный вид электродвигателя используется в быту там, где необходима постоянная скорость вращения, возможность ее регулировки, а так же если необходима скорость вращения более 3000 оборотов в минуту (это максимум для асинхронных).
Синхронные моторы устанавливаются в электроинструменте, пылесосе, стиральной машине и т. д.
В корпусе синхронного двигателя переменного тока расположены обмотки (3 на рисунке), которые также намотаны и на ротор или якорь (1). Их выводы припаяны к секторам токосъемного кольца или коллектора (5), на которые при помощи графитовых щеток (4) подается напряжение. При чем выводы расположены так, что щетки всегда подают напряжение только на одну пару.
Наиболее частыми поломками коллекторных двигателей является:
- Износ щеток или их плохой их контакт из-за ослабления прижимной пружины.
- Загрязнение коллектора. Чистите либо спиртом или нулевой наждачной бумагой.
- Износ подшипников.
Принцип работы. Вращающий момент в электромоторе создается в результате взаимодействия между током тока якоря и магнитным потоком в обмотке возбуждения. С изменением направления переменного тока будет меняться и направление магнитного потока одновременно в корпусе и якоре, благодаря чему вращение всегда будет в одну сторону.
изучить устройство, принцип действия, характеристики электродвигателя постоянного тока;
приобрести практические навыки пуска, эксплуатации и остановки электродвигателя постоянного тока;
экспериментально исследовать теоретические сведения о характеристиках электродвигателя постоянного тока.
Основные теоретические положения
Электродвигатель постоянного тока - электрическая машина, предназначенная для преобразования электрической энергии в механическую.
Устройство электродвигателя постоянного тока не имеет отличий от генератора постоянного тока. Это обстоятельство делает электрические машины постоянного тока обратимыми, то есть позволяет их использовать как в генераторном, так и в двигательном режимах. Конструктивно электродвигатель постоянного тока имеет неподвижные и подвижные элементы, которые показаны на рис. 1.
Неподвижная часть - статор 1 (станина) изготовлен из стального литья, состоит из главных 2 и дополнительных 3 полюсов с обмотками возбуждения 4 и 5 и щеточной траверсой со щетками. Статор выполняет функцию магнитопровода. С помощью главных полюсов создается постоянное во времени и неподвижное в пространстве магнитное поле. Дополнительные полюсы размещаются между главными полюсами и улучшают условия коммутации.
Подвижной частью электродвигателя постоянного тока является ротор 6 (якорь), который размещается на вращающемся вале. Якорь также играет роль магнитопровода. Он набран из тонких, электрически изолированных друг от друга, тонких листов электротехнической стали с повышенным содержанием кремния, что позволяет уменьшить потери мощности. В пазах якоря запрессованы обмотки 7, выводы которых соединяются с пластинами коллектора 8, размещенными на этом же вале электродвигателя (см. рис. 1).
Рассмотрим принцип работы электродвигателя постоянного тока. Подключение постоянного напряжения к зажимам электрической машины вызывает одновременное возникновение в обмотках возбуждения (статора) и в обмотках якоря тока (рис. 2). В результате взаимодействия тока якоря с магнитным потоком, создаваемым обмоткой возбуждения в статоре возникает сила f , определяемая по закону Ампера. Направление этой силы определяется правилом левой руки (рис. 2), согласно которому она ориентируется перпендикулярно как к токуi (в обмотке якоря), так и к вектору магнитной индукции В (создаваемой обмоткой возбуждения). В результате на ротор действует пара сил (рис. 2). На верхнюю часть ротора сила действует вправо, на нижнюю – влево. Эта пара сил создает вращающий момент, под действием которого якорь приводится во вращение. Величина возникающего электромагнитного момента оказывается равной
M = c м I я Ф ,
где с м - коэффициент, зависящий от конструкции обмотки якоря и числа полюсов электродвигателя;Ф - магнитный поток одной пары главных полюсов электродвигателя;I я - ток якоря двигателя. Как следует из рис. 2, поворот обмоток якоря сопровождается одновременным изменением полярности на коллекторных пластинах. Направление тока в витках обмотки якоря изменяется на противоположное, но магнитный поток обмоток возбуждения сохраняет прежнее направление, что и обусловливает неизменность направления силf , а значит, и вращательного момента.
Вращение якоря в магнитном поле приводит к появлению в его обмотке ЭДС, направление которой определяется уже по правилу правой руки. В результате для представленной на рис. 2 конфигурации полей и сил в обмотке якоря возникнет индукционный ток, направленный противоположно основному току. Поэтому возникающая ЭДС называется противоЭДС. Величина ее равна
E = с e nФ ,
где n - частота вращения якоря электродвигателя;с e - коэффициент, зависящий от конструктивных элементов машины. Эта ЭДС ухудшает рабочие характеристики электродвигателя.
Ток в якоре создает магнитное поле, которое воздействует на магнитное поле главных полюсов (статора), что называется реакцией якоря. В режиме холостого хода машины магнитное поле создается только главными полюсами. Это поле симметрично относительно осей этих полюсов и соосно с ними. При подключении к двигателю нагрузки за счет тока в обмотке якоря создается магнитное поле – поле якоря. Ось этого поля будет перпендикулярна оси главных полюсов. Так как при вращении якоря распределение тока в проводниках якоря остается неизменным, то поле якоря остается неподвижным в пространстве. Сложение этого поля с полем главных полюсов дает результирующее поле, которое разворачивается на угол против направления вращения якоря. В итоге уменьшается вращающий момент, так как часть проводников попадает в зону полюса противоположной полярности и создает тормозной момент. При этом происходит искрение щеток и обгорание коллектора, возникает продольное размагничивающее поле.

С целью уменьшения влияния реакции якоря на работу машины в него встраивают дополнительные полюса. Обмотки таких полюсов включаются последовательно с основной обмоткой якоря, но изменение направление намотки в них вызывает появление магнитного поля, направленного против магнитного поля якоря.
Для изменения направления вращения электродвигателя постоянного тока необходимо изменить полярность напряжения, подводимого к якорю или обмотке возбуждения.
В зависимости от способа включения обмотки возбуждения различают электродвигатели постоянного тока с параллельным, последовательным и смешанным возбуждением.
У двигателей с параллельным возбуждением обмотка рассчитана на полное напряжение питающей сети и включается параллельно цепи якоря (рис. 3).
Двигатель с последовательным возбуждением имеет обмотку возбуждения, которая включается последовательно с якорем, поэтому эта обмотка рассчитана на полный ток якоря (рис. 4).
Двигатели со смешанным возбуждением имеют две обмотки, одна включается параллельно, другая - последовательно с якорем (рис. 5).

Рис. 3 Рис. 4
При пуске электродвигателей постоянного тока (независимо от способа возбуждения) путем прямого включения в питающую сеть возникают значительные пусковые токи, которые могут привести к выходу их из строя. Это происходит в результате выделения значительного количества теплоты в обмотке якоря и последующего нарушения ее изоляции. Поэтому пуск двигателей постоянного тока производится специальными пусковыми приспособлениями. В большинстве случаев для этих целей применяется простейшее пусковое приспособление - пусковой реостат. Процесс пуска электродвигателя постоянного тока с пусковым реостатом показан на примере двигателя постоянного тока с параллельным возбуждением.
Исходя из уравнения, составленного в соответствии со вторым законом Кирхгофа для левой части электрической цепи (см. рис. 3), пусковой реостат полностью выведен (R пуск = 0), ток якоря
 ,
,
где U - напряжение, подводимое к электродвигателю;R я - сопротивление обмотки якоря.
В начальный момент пуска электродвигателя частота вращения якоря n = 0, поэтому противоэлектродвижущая сила, наводимая в обмотке якоря, в соответствии с полученным ранее выражением также будет равна нулю (Е = 0).
Сопротивление обмотки якоря R я - величина довольно малая. Для того чтобы ограничить возможный при этом недопустимо большой ток в цепи якоря при пуске, последовательно с якорем независимо от способа возбуждения двигателя включается пусковой реостат (пусковое сопротивлениеR пуск). В этом случае пусковой ток якоря
 .
.
Сопротивление пускового реостата R пуск рассчитывают для работы только на время пуска и подбирают таким образом, чтобы пусковой ток якоря электродвигателя не превышал допустимого значения (I я,пуск 2I я,ном). По мере разгона электродвигателя ЭДС, наводимая в обмотке якоря, вследствие возрастания частоты его вращения n возрастает (Е =с e nФ ). В результате этого ток якоря при прочих равных условиях уменьшается. При этом сопротивление пускового реостатаR пуск по мере разгона якоря электродвигателя необходимо постепенно уменьшать. После окончания разгона двигателя до номинального значения частоты вращения якоря ЭДС возрастает настолько, что пусковое сопротивление может быть сведено к нулю, без опасности значительного возрастания тока якоря.
Таким образом, пусковое сопротивление R пуск в цепи якоря необходимо только при пуске. В процессе нормальной работы электродвигателя оно должно быть отключено, во-первых, потому, что рассчитано на кратковременную работу во время пуска, во-вторых, при наличии пускового сопротивления в нем будут возникать тепловые потери мощности, равныеR пуск I 2 я, существенно снижающие КПД электродвигателя.

 .
.
С учетом выражения для ЭДС (Е =с e nФ ), записав полученную формулу относительно частоты вращения, получаем уравнение частотной (скоростной) характеристики электродвигателяn (I я):
 .
.
Из него следует, что при отсутствии нагрузки на валу и токе якоря I я = 0 частота вращения электродвигателя при данном значении питающего напряжения
 .
.
Частота вращения электродвигателя n 0 является частотой вращения идеального холостого хода. Кроме параметров электродвигателя она зависит также от значения подводимого напряжения и магнитного потока. С уменьшением магнитного потока при прочих равных условиях частота вращения идеального холостого хода возрастает. Поэтому в случае обрыва цепи обмотки возбуждения, когда ток возбуждения становится равным нулю (I в = 0), магнитный поток двигателя снижается до значения, равного значению остаточного магнитного потокаФ ост. При этом двигатель “идет в разнос”, развивая частоту вращения, на много большую номинальной, что представляет определенную опасность как для двигателя, так и для обслуживающего персонала.
Частотная (скоростная) характеристика электродвигателя постоянного тока с параллельным возбуждением n (I я) при постоянном значении магнитного потокаФ =const и постоянном значении подводимого напряженияU = const имеет вид прямой (рис. 6).

Выражая в уравнениях частотных характеристик ток якоря через электромагнитный момент двигателя М = с м I я Ф , получим уравнение механической характеристики, т. е. зависимостиn (М ) приU = const для двигателей с параллельным возбуждением:
 .
.
Пренебрегая влиянием реакции якоря в процессе изменения нагрузки, можно принять электромагнитный момент двигателя пропорциональным току якоря. Поэтому механические характеристики двигателей постоянного тока имеют такой же вид, как и соответствующие частотные характеристики. Электродвигатель с параллельным возбуждением имеет жесткую механическую характеристику (рис. 7). Из этой характеристики видно, что его частота вращения с ростом момента нагрузки снижается незначительно, так как ток возбуждения при параллельном включении обмотки возбуждения и соответственно магнитный поток двигателя остаются практически неизменными, а сопротивление цепи якоря относительно мало.

Рабочие характеристики электродвигателя постоянного тока с параллельным возбуждением представлены на рис. 8. Из этих характеристик видно, что частота вращения n электродвигателей с параллельным возбуждением с увеличением нагрузки несколько уменьшается. Зависимость полезного момента на валу двигателя от мощностиР 2 представляет собой почти прямую линию, так как момент этого двигателя пропорционален нагрузке на валу:М =kР 2 / n . Искривление указанной зависимости объясняется некоторым снижением частоты вращения с увеличением нагрузки.
При Р 2 = 0 ток, потребляемый электродвигателем, равен току холостого хода. При увеличении мощности ток якоря увеличивается приблизительно по той же зависимости, что и момент нагрузки на валу, так как при условииФ =const ток якоря пропорционален моменту нагрузки. КПД электродвигателя определяют как отношение полезной мощности на валу к мощности, потребляемой из сети:
 ,
,
где Р 2 - полезная мощность на валу;Р 1 =UI - мощность, потребляемая электродвигателем из питающей сети;Р эя =I 2 я R я - электрические потери мощности в цепи якоря,Р эв =UI в, =I 2 в R в - электрические потери мощности в цепи возбуждения;Р мех - механические потери мощности;Р м - потери мощности на гистерезис и вихревые токи.


При неизменном напряжении питающей сети и неизменном магнитном потоке в процессе изменения значения сопротивления якорной цепи можно получить семейство механических характеристик, например, для электродвигателя с параллельным возбуждением (рис. 9).
Преимущество рассмотренного способа регулирования заключается в его относительной простоте и возможности получить плавное изменение частоты вращения в широких пределах (от нуля до номинального значения частоты n ном). К недостаткам этого способа следует отнести то, что имеют место значительные потери мощности в добавочном сопротивлении, увеличивающиеся с уменьшением частоты вращения, а также необходимость использования дополнительной регулирующей аппаратуры. Кроме того, этот способ не позволяет регулировать частоту вращения электродвигателя вверх от ее номинального значения.
Изменения частоты вращения электродвигателя постоянного тока можно достигнуть и в результате изменения значения магнитного потока возбуждения. При изменении магнитного потока в соответствии с уравнением частотной характеристики для двигателей постоянного тока с параллельным возбуждением при постоянном значении напряжения питающей сети и неизменном значении сопротивления якорной цепи можно получить семейство механических характеристик, представленных на рис. 10.

К недостаткам этого способа следует отнести также относительно небольшой диапазон регулирования вследствие наличия ограничений по механической прочности и коммутации электродвигателя. Преимуществом данного способа регулирования является его простота. Для двигателей с параллельным возбуждением это достигается изменением сопротивления регулировочного реостата R р в цепи возбуждения.
У двигателей постоянного тока с последовательным возбуждением изменение магнитного потока достигается шунтированием обмотки возбуждения сопротивлением, имеющим соответствующее значение, либо замыканием накоротко определенного количества витков обмотки возбуждения.
Широкое применение, особенно в электроприводах, построенных по системе генератор - двигатель, получил способ регулирования частоты вращения путем изменения напряжения на зажимах якоря двигателя. При постоянных магнитном потоке и сопротивлении якорной цепи в результате изменения напряжения на якоре можно получить семейство частотных характеристик.

С изменением подводимого напряжения частота вращения идеального холостого хода n 0 в соответствии с приведенным ранее выражением изменяется пропорционально напряжению. Так как сопротивление цепи якоря остается неизменным, то жесткость семейства механических характеристик не отличается от жесткости естественной механической характеристики приU =U ном.
Преимуществом рассмотренного способа регулирования является широкий диапазон изменения частоты вращения без увеличения потерь мощности. К недостаткам данного способа следует отнести то, что при этом необходим источник регулируемого питающего напряжения, а это приводит к увеличению массы, габаритов и стоимости установки.
1. Цель работы: Изучить особенности пуска, механическую характеристику и способы регулирования частоты вращения двигателя постоянного тока со смешанным возбуждением.
Адание.
2.1. к самостоятельной работе:
Изучить особенности конструкции, схемы включения двигателей постоянного тока ;
Изучить методику получения механических характеристик двигателя постоянного тока ;
Ознакомиться с особенностями пуска и регулирования частоты вращения двигателя постоянного тока ;
Вычертить принципиальные схемы для измерения сопротивлений цепи якоря и обмоток возбуждения (рис.6.4) и испытания двигателя (рис.6.2);
Используя рис. 6.2 и 6.3 составить монтажную схему;
Вычертить формы таблиц 6.1... 6.4;
Подготовить устные ответы на контрольные вопросы.
2.2. к работе в лаборатории:
Ознакомиться с лабораторной установкой;
Записать в таблицу 6.1. паспортные данные двигателя;
Измерить сопротивление цепи якоря и обмоток возбуждения. Данные записать в таблицу 6.1;
Собрать схему и провести исследование двигателя, данные записать в таблицы 6.2, 6.3, 6.4;
Построить естественную механическую характеристику n=f(M) и скоростные характеристики n=f(I B) и n=f(U);
Сделать выводы по результатам исследования.
Общие сведения.
Двигатели постоянного тока в отличие от двигателей переменного тока (прежде всего асинхронных) имеют большую кратность пускового момента и перегрузочную способность, обеспечивают плавное регулирование частоты вращения рабочей машины. По этому они применяются для привода машин и механизмов с тяжелыми условиями пуска (например, в качестве стартеров в двигателях внутреннего сгорания), а также при необходимости регулирования частоты вращения в больших пределах (механизмы подачи станков, обкаточно-тормозные стенды, электрифицированные транспортные средства).
Конструктивно двигатель состоит из неподвижного узла (индуктора) и вращающегося узла (якоря). На магнитопроводе индуктора расположены обмотки возбуждения. В двигателе смешанного возбуждения их две: параллельная с выводами Ш 1 и Ш2 и последовательная с выводами С1 и С2 (рис.6.2). Сопротивление параллельной обмотки R овш составляет в зависимости от мощности двигателя от нескольких десятков до сотен Ом. Она выполнена проводом малого сечения с большим числом витков. Последовательная обмотка имеет малое сопротивление R obc (обычно от нескольких Ом до долей Ома), т.к. состоит из небольшого числа витков провода большого сечения. Индуктор служит для создания магнитного потока возбуждения при питании его обмоток постоянным током.
Обмотка якоря размещена в пазах магнитопровода и выведена на коллектор. С помощью щеток ее выводы Я I и Я 2 подключаются к источнику постоянного тока. Сопротивление обмотки якоря R Я невелико (Омы или доли Ома).
Вращающий момент М двигателя постоянного тока создается при взаимодействии тока якоря Iя с магнитным потоком возбуждения Ф:
М=К × Iя × Ф, (6.1)
где К - постоянный коэффициент, зависящий от конструкции двигателя.
При вращении якоря его обмотка пересекает магнитный поток возбуждения и в ней индуктируется ЭДС Е, пропорциональная частоте вращения n:
Е = С × n × Ф, (6.2)
где С - постоянный коэффициент, зависящий от конструкции двигателя.
Ток в цепи якоря:
I Я =(U–Е)/(R Я +R ОВС)=(U–С×n ×Ф)/(R Я +R ОВС), (6.3)
Решая совместно выражения 6.1 и 6.3 относительно п, находят аналитическое выражение механической характеристики двигателя n=F(М). Ее графическое изображение приведено на рисунке 6.1.
Рис. 6.1. Механическая характеристика двигателя постоянного тока смешанного возбуждения
Точка А соответствует работе двигателя вхолостую с частотой вращения n о. С увеличением механической нагрузки частота вращения снижается, а вращающий момент растет, достигая в точке В номинального значения М H . На участке ВС двигатель работает с перегрузкой. Ток Iя превышает номинальную величину, что приводит к быстрому нагреву обмоток якоря и ОВС, увеличивается искрение на коллекторе. Максимальный момент М mах (точка С) ограничивается условиями работы коллектора и механической прочностью двигателя.
Продолжая механическую характеристику до пересечения в точке Д" с осью вращающего момента мы получили бы значение пускового момента при прямом включении двигателя в сеть. ЭДС Е равна нулю и ток в цепи якоря в соответствии с формулой 6.3 резко возрастает.
Для снижения пускового тока последовательно в цепь якоря включают пусковой реостат Rx (рис. 6.2) с сопротивлением:
Rx = U H / (1.3...2.5) ×I Я.Н. - (R Я - R obc), (6.4)
где U h - номинальное напряжение сети;
I Я.Н. - номинальный ток якоря.
Снижение тока якоря до (1.3...2.5)×I Я.Н. обеспечивает достаточный начальный пусковой момент Мп (точка Д). По мере разгона двигателя сопротивление Rx уменьшают до нуля, поддерживая приблизительно постоянную величину Мп (участок СД).
Реостат R В в цепи параллельной обмотки возбуждения (рис. 6.2) позволяет регулировать величину магнитного потока Ф (формула 6.1). Перед пуском двигателя его полностью выводят для получения необходимого пускового момента при минимальном токе якоря.
Используя формулу 6.3, определим частоту вращения двигателя
n = (U - I Я (R Я + R obc + Rx)) / (С Ф), (6.5)
в которой R Я, R obc и С являются постоянными величинами, а U, I Я и Ф можно изменять. Отсюда вытекает три возможных способа регулирования частоты вращения двигателя:
Изменением величины подводимого напряжения;
Изменением величины тока якоря с помощью регулировочного реостата Rx, который в отличие от пускового рассчитывается на продолжительный режим работы;
Изменением величины магнитного потока возбуждения Ф, который пропорционален току в обмотках ОВШ и ОВС. В параллельной обмотке его можно регулировать реостатом R b . Сопротивление R b принимают в зависимости от требуемых пределов регулирования частоты вращения R В =(2...5) R obш.
В паспортной табличке двигателя указывается номинальная частота вращения, которая соответствует номинальной мощности на валу двигателя при номинальном напряжении сети и выведенных сопротивлениях реостатов R X и R B .
Лабораторная работа № 9
Тема. Изучение электродвигателя постоянного тока.
Цель работы: изучить устройство и принцип работы электродвигателя.
Оборудование: модель электродвигателя, источник тока, реостат, ключ, амперметр, соединительные провода, рисунки, презентация.


ЗАДАНИЯ:
1 . Изучите устройство и принцип работы электродвигателя, используя презентацию, рисунки и модель.
2 . Присоедините электродвигатель к источнику тока и наблюдайте за его работой. Если двигатель не работает, установите причину, постарайтесь устранить неполадку.
3 . Укажите два главных элемента в устройстве электродвигателя.
4 . На каком физическом явлении основано действие электродвигателя?
5 . Измените направление вращения якоря. Запишите, что для этого нужно сделать.
6. Соберите электрическую цепь, соединив последовательно электродвигатель, реостат, источник тока, амперметр и ключ. Измените силу тока и наблюдайте за работой электродвигателя. Меняется ли скорость вращения якоря? Запишите вывод о зависимости силы, действующей со стороны магнитного поля на катушку, от силы тока в катушке.
7 . Электродвигатели могут быть любой мощности, т.к.:
А) можно менять силу тока в обмотке якоря;
Б) можно менять магнитное поле индуктора.
Укажите правильный ответ:
1) верно только А; 2) верно только Б; 3) верно и А, и Б; 4) неверно и А, и Б.
8 . Перечислите преимущества электродвигателя по сравнению с тепловым двигателем.